

╣żśIÖCŲ„╚╦╩Ūę╗éĆÅ═ļsĄ─ū„śIŽĄĮyŻ¼░³└©ł╠ąąÖCśŗĪó“īäė┼cé„äėŽĄĮyĪó┐žųŲŽĄĮy ║═ųŪ─▄ŽĄĮyĄ╚ÄūéĆ▓┐ĘųĪŻ╣żśIÖCŲ„╚╦Ą─╗∙▒ŠĮYśŗ╚ńłD1-1╦∙╩ŠĪŻ
1.ł╠ąąÖCśŗ
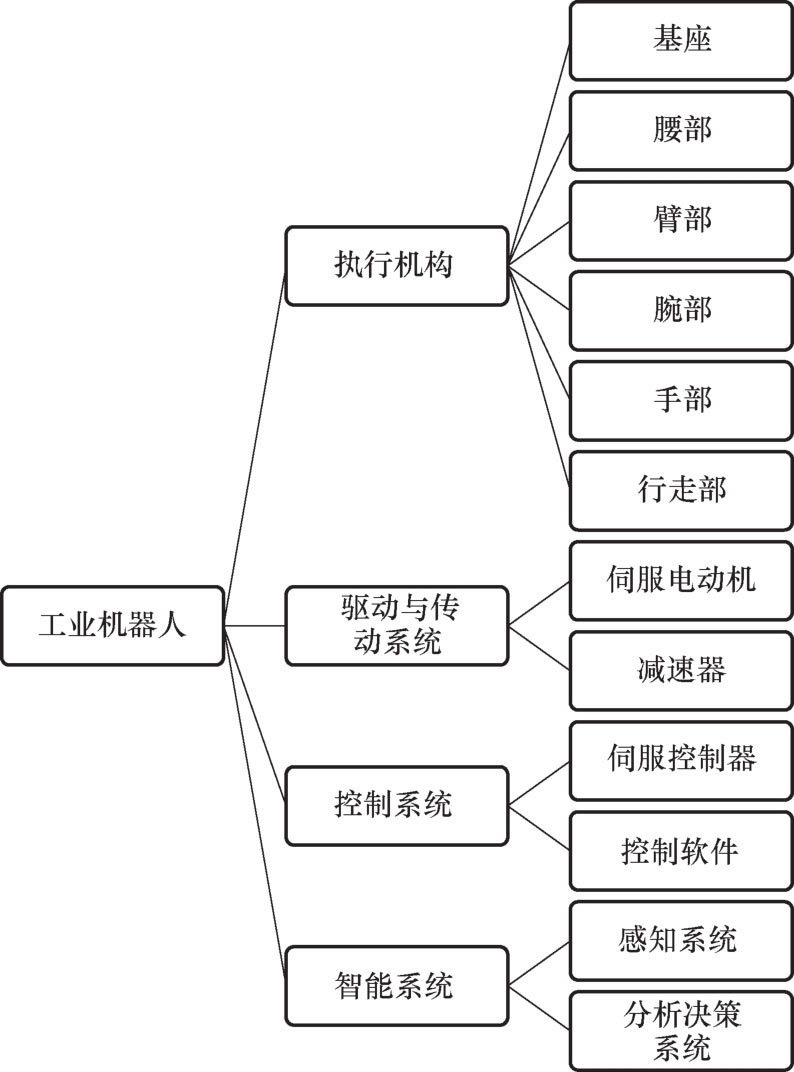
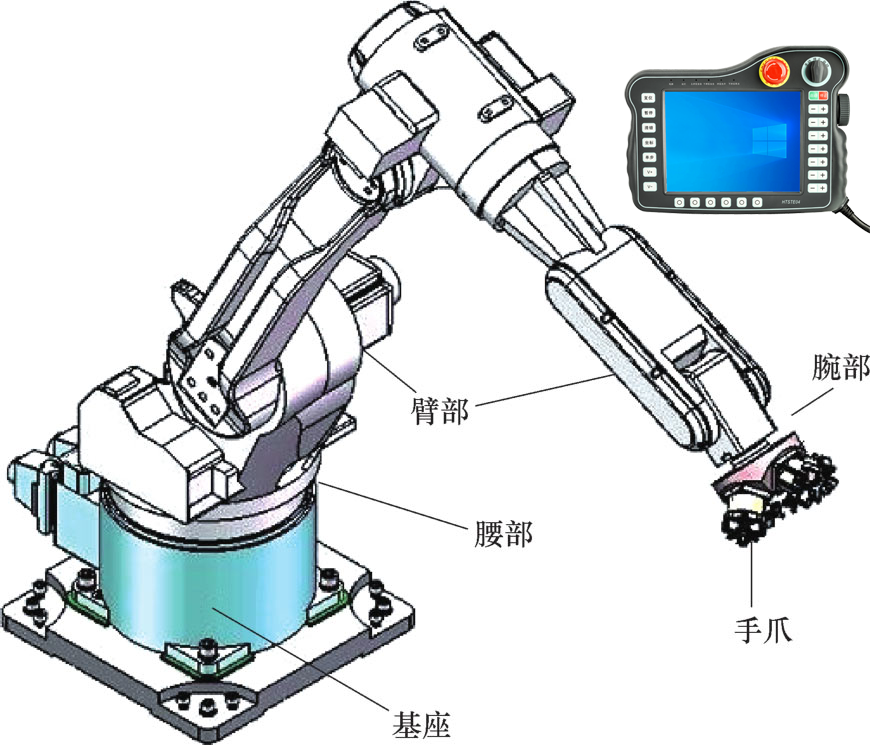
╣żśIÖCŲ„╚╦Ą─ł╠ąąÖCśŗŻ¼Š═╩ŪśIā╚│ŻšfĄ─╣żśIÖCŲ„╚╦▒Š¾wĪŻ│÷ė┌ą╬Ž¾╗»Ą─┐╝æ]Ż¼│Żīó╣żśIÖCŲ„╚╦▒Š¾wĄ─ėąĻP▓┐╬╗ĘųäeĘQ×ķ╗∙ū∙Īóč³▓┐Īó▒█▓┐Īó═¾▓┐Īó╩ų▓┐║═ąąū▀▓┐Ą╚ĪŻ╩ų▓┐ėųĘQ─®Č╦ł╠ąąŲ„Ż©╗“╩ųū”Ż®Ż¼╦³╩Ū╣żśIÖCŲ„╚╦ų▒ĮėÅ─╩┬ū„śIĄ─▓┐╬╗Ż¼Š▀ėąŖA│ųĪó▀\▌öĪóīó╣ż╝■Ę┼ų├ĄĮ─│ę╗éĆ╬╗ų├Ą─╣”─▄ĪŻ═¾▓┐ŽÓ«öė┌╚╦Ą─╩ų═¾Ż¼Ųõ╔ŽČ╦┼c▒█▓┐ŽÓ▀BŻ¼ŲõŽ┬Č╦┼c╩ų▓┐ŽÓĮėŻ¼ęįĦäė╩ų▓┐īŹ¼F▒žę¬Ą─äėū„┼cū╦æBĪŻ▒█▓┐ŽÓ«öė┌╚╦Ą─Ėņ▓▓Ż¼ Ž┬▀B╩ų═¾Ż¼╔ŽĮėč³╔ĒŻ¼ę╗░Ńė╔ąĪ▒█║═┤¾▒█ĮM│╔ĪŻČÓĻP╣ØÖCŲ„╚╦▒█▓┐ę╗░Ń▓╔ė├┐šķgķ_µ£ ▀BŚUÖCśŗŻ¼ŲõųąĄ─▀\äėĖ▒Ż©▐DäėĖ▒╗“ęŲäėĖ▒Ż®│ŻĘQ×ķĻP╣ØŻ¼ĻP╣ØéĆöĄ═©│Ż╩ŪÖCŲ„╚╦Ą─ūįė╔Č╚öĄĪŻč³▓┐▀BĮė▒█▓┐║═╗∙ū∙Ż¼ę╗░Ńū÷╗ž▐D▀\äėĪŻ╗∙ū∙╩Ūš¹éĆÖCŲ„╚╦Ą─ų¦ō╬▓┐╝■Ż¼ėą╣╠Č©╩Į║═ęŲäė╩Įā╔ĘNŅÉą═Ż¼į┌ęŲäė╩ĮĄ─ŅÉą═ųąŻ¼ėą▌å╩ĮĪó┬─Ħ╩Į║═Ę┬╚╦ą╬ÖCŲ„╚╦Ą─▓Įąą╩ĮĄ╚ĪŻ╣żśIÖCŲ„╚╦ł╠ąąÖCśŗŻ©▒Š¾wŻ®╚ńłD1-2╦∙╩ŠĪŻ
2.“īäė┼cé„äėŽĄĮy
“īäė┼cé„äėŽĄĮy╩Ūīó─▄į┤é„╦═ĄĮł╠ąąÖCśŗĄ─čbų├ĪŻ“īäėŽĄĮyĄ─ų„ꬓīäėĘĮ╩ĮėąŻ║ ļŖÜŌ“īäėŻ©ų▒┴„╦┼Ę■ļŖäėÖCĪóĮ╗┴„╦┼Ę■ļŖäėÖC║═▓Į▀MļŖäėÖCŻ®Īóę║ē║“īäė╝░ą┬ą═“īäėĪŻļŖÜŌ“īäė╩Ū─┐Ū░╩╣ė├ūŅČÓĄ─ę╗ĘN“īäėĘĮ╩ĮŻ¼ā׳c╩Ū¤oŁhŠ│╬█╚ŠĪó▀\äėŠ½Č╚Ė▀ĪóļŖį┤╚Īė├ĘĮ▒ŃĪóĒææ¬┐ņĪó“īäė┴”┤¾Ą╚ĪŻé„äėÖCśŗūŅ│Żė├Ą─ėą£p╦┘Ų„ĪóØLųķĮzĖ▄Īóµ£ĪóĦ╝░²X▌åĄ╚ĪŻ╣żśIÖCŲ„╚╦“īäė┼cé„äėŽĄĮy╚ńłD1-3╦∙╩ŠĪŻ

3.┐žųŲŽĄĮy
┐žųŲŽĄĮyĄ─╚╬äš╩ŪĖ∙ō■ÖCŲ„╚╦Ą─ū„śIųĖ┴Ņęį╝░Å─é„ĖąŲ„Ę┤ü╗žüĒĄ─ą┼╠¢Ż¼ų¦┼õł╠ąąÖCśŗ╚ź═Ļ│╔ęÄČ©Ą─▀\äė║═╣”─▄ĪŻŠ▀éõą┼ŽóĘ┤ü╠žš„Ą─┐žųŲŽĄĮyĘQ×ķķ]Łh┐žųŲŽĄĮyŻ╗ ŽÓĘ┤Ż¼▓╗Š▀éõą┼ŽóĘ┤ü╠žš„Ą─┐žųŲŽĄĮyĘQ×ķķ_Łh┐žųŲŽĄĮyĪŻ┐žųŲŽĄĮyė╔┐žųŲėŗ╦ŃÖC╝░ŽÓæ¬Ą─┐žųŲ▄ø╝■║═╦┼Ę■┐žųŲŲ„ĮM│╔Ż¼ŽÓ«öė┌╚╦Ą─╔±ĮøŽĄĮyŻ¼ī”Ųõł╠ąąÖCśŗ░l│÷╚ń║╬äėū„Ą─├³┴ŅĪŻĖ∙ō■ū„śI╚╬äšę¬Ū¾Ą─▓╗═¼Ż¼╣żśIÖCŲ„╚╦Ą─┐žųŲĘĮ╩Į┐╔Ęų×ķ³c╬╗┐žųŲĪó▀B└m▄ē█E┐žųŲ║═┴”/┴”Šž┐žųŲŻ¼▓╔ė├ÖCŲ„╚╦╩ŠĮ╠Ų„į┌ŠĆŠÄ│╠ĪŻ
4.ųŪ─▄ŽĄĮy
╣żśIÖCŲ„╚╦Ą─ųŪ─▄ŽĄĮy╩ŪųĖ─▄ē“╩╣╣żśIÖCŲ„╚╦«a╔·ŅÉ╦Ų╚╦ŅÉųŪ─▄ąą×ķĄ─ŽĄĮyŻ¼į┌ø]ėą╚╦Ė╔ŅAĄ─ŪķørŽ┬Ż¼▀_ĄĮ╣żśIÖCŲ„╚╦─▄ē“īŹ¼Fūįų„┐žųŲĄ──┐Ą─ĪŻųŪ─▄ŽĄĮy┐╔Ęų×ķĖąų¬ŽĄĮy║═Ęų╬÷øQ▓▀ŽĄĮyĪŻŲõųąŻ¼Ėąų¬ŽĄĮyų„ę¬┐┐Š▀ėąĖąų¬▓╗═¼ą┼ŽóĄ─é„ĖąŲ„śŗ│╔ĪŻ╣żśIÖCŲ„╚╦Ą─Ėąų¬ŽĄĮyė╔ā╚▓┐é„ĖąŲ„─ŻēK║══Ō▓┐é„ĖąŲ„─ŻēKĮM│╔Ż¼ęį½@╚Īā╚▓┐║══Ō▓┐ŁhŠ│ųąėąė├Ą─ą┼ŽóĪŻā╚▓┐é„ĖąŲ„ė├üĒÖz£yÖCŲ„╚╦Ą─ūį╔ĒĀŅæBŻ¼░³└©╬╗ų├é„ĖąŲ„Īó╦┘Č╚é„ĖąŲ„Īó╝ė╦┘Č╚é„ĖąŲ„ĪóāAą▒ĮŪé„ĖąŲ„ĪóĘĮ╬╗é„ĖąŲ„Ą╚Ż╗═Ō▓┐é„ĖąŲ„ė├üĒĖąų¬ų▄ć·ŁhŠ│Ż¼Öz£yū„śIī”Ž¾┼cū„śIŁhŠ│Ą─ĀŅæBŻ¼╚ńęĢėXĪó┴”/┴”ŠžĪóė|ėXĪóĮėĮ³ėXĪóŠÓļxĪó£žČ╚Ą╚é„ĖąŲ„ĪŻĘų╬÷øQ▓▀ŽĄĮyī”▓╔╝»üĒĄ─Ė„ĘNā╚═Ō▓┐öĄō■╝ėęį╠Ä└ĒŻ¼▀MąąŠC║Ž┼ąöÓ║¾Ż¼Ė∙ō■┼ąöÓĮY╣¹ą╬│╔ī”Ž┬ę╗▓ĮąąäėĄ─ųĖ┴ŅĪŻ
